
Hesai x Thoro.ai: How the JT128 Powers CoreFlex AMR Autonomy in Real-World 3PL Environments
A 3PL distribution center doesn’t wait for robots to catch up. Staging areas move weekly. Temporary rack extensions appear overnight. Workers, forklifts, and floor jacks share the same aisles with no fixed right-of-way. When Thoro.ai arrived to deploy their CoreFlex autonomous pallet mover, the facility looked nothing like its floor plan. A charging station sat in a corner shown as empty. Two aisles had new rack extensions. The original map was already outdated on day one.
Most autonomous systems fail here: not because of bad software, but because they were built for environments that cooperate. This one doesn’t.
Thoro.ai built CoreFlex for exactly this kind of chaos. And at the core of its perception stack is a single sensor choice: the Hesai JT128.

Mapping a Moving Target
Traditional autonomous vehicles map the environment once, then navigate against that reference. In a live 3PL, that approach breaks down fast. When the environment changes, the robot gets confused and needs to be taken offline for re-mapping.
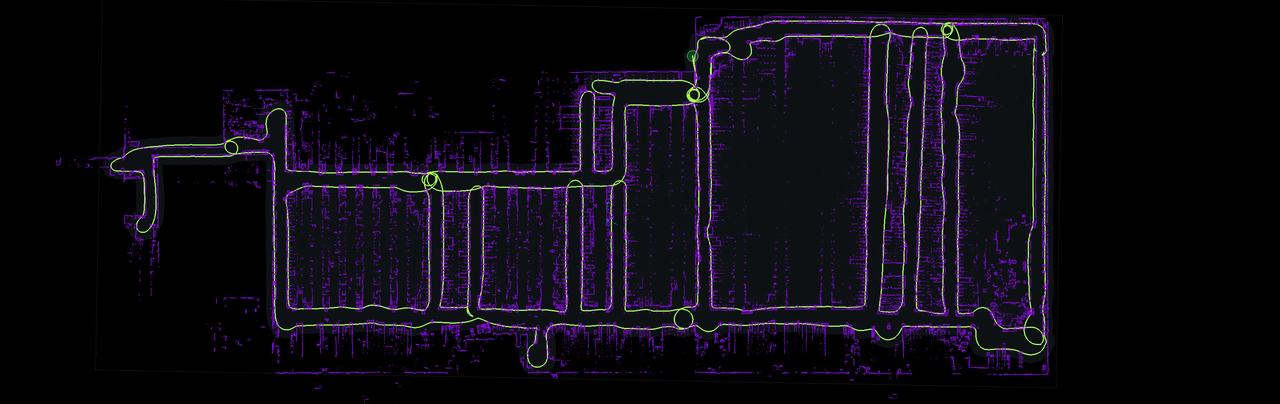
CoreFlex takes a different approach: it never stops mapping.
From the moment it powers on, JT128 empowers CoreFlex to build a probabilistic map that continuously ages out stale data and incorporates fresh observations. Rather than relying on a single scan plane like conventional 2D lidar, the JT128’s full 187° vertical field of view synthesizes spatial data across the entire vertical range, giving the SLAM stack richer geometry for more accurate loop closure, and enough resolution at operational speeds to tell the difference between a permanent wall and a parked cart. A pallet stack that appeared at 6 AM and moved by noon is treated as temporary, not structural. Walls stay walls. Everything else is provisional.
The result: CoreFlex treats environmental change as the baseline condition, not an exception.
Sharing Space With People Who Don’t Know You’re There
Order pickers move fast when they’re behind on rate. Reach trucks reverse without warning. Dock doors open and a wave of floor jacks rolls in.
CoreFlex AMR doesn’t just avoid collisions, it anticipates them. Powered by the JT128’s 360° × 187° coverage, the system simultaneously tracks floor-level pedestrian movement and overhead rack intrusions from a single unit, with no sensor fusion gaps. When a pedestrian enters the vehicle’s zone, CoreFlex projects their likely movement trajectory and adjusts its own path before a conflict develops. Operators described the vehicle as “easy to work around”, which is exactly the goal. A robot that constantly stops and waits creates as much disruption as one that forces workers to detour.
The dock area was the hardest test. Open dock doors change the lighting. Trucks create large, irregular occlusions. Workers move fast and unpredictably. With the JT128 maintaining full spatial awareness through every condition, CoreFlex operated in the dock zone without requiring the area to be cleared or any workflow changes around it.
Executing Tasks in Imperfect Conditions
Getting to the right location is half the job. Executing the pick or placement accurately is the other half, and in a 3PL, conditions are never clean.
Pallet positions drift. Rack beam heights vary across zones built at different times. Shrink-wrapped loads have irregular protrusions. Systems that depend on the environment matching their assumptions will fail routinely.
Thoro.ai’s in-house vision AI models run continuously during task operations, trained on the variation a real 3PL produces. Backed by the JT128’s 128-channel point cloud, the vision layer has enough fidelity to read live geometry at the moment of execution: fork height is adjusted to match the detected pallet face, rack alignment is confirmed against the real-time point cloud, and disengagement is metered against what the sensor actually sees, not what the system predicted. One of the most common hidden costs in autonomous forklift deployment is the operational overhead of making the environment suit the machine: enforcing pallet specs, adding infrastructure, pre-positioning inventory. By grounding every task decision in high-resolution real-world data, CoreFlex eliminates that requirement entirely.

Scaling From One Vehicle to a Fleet
A single vehicle performing well is a proof of concept. A fleet of vehicles performing well is an operational system, and scaling introduces new failure modes.
Two independently well-behaved robots can create gridlock at an intersection if their individual planning doesn’t account for each other. Thoro.ai’s fleet coordination architecture handles this through decentralized task allocation and traffic management, with each vehicle querying a shared system as it executes missions.
The JT128 contributes two things to fleet performance that aren’t obvious from a single-vehicle deployment:
First, the position accuracy and update rate the sensor provides directly improves the quality of fleet coordination decisions, better inputs produce less conservative (and more efficient) outputs.
Second, sensor consistency. Every vehicle in the fleet runs the same 128-channel hardware. Thoro Cloud has a unified data baseline for health monitoring across the fleet. When a vehicle’s perception behavior deviates from baseline, the anomaly is visible in the data. That kind of diagnostic transparency only works when every unit produces comparable point cloud data.
Three months after go-live, the workforce had largely stopped thinking about CoreFlex AMR, because it had become a reliable part of how the facility runs. Not because the environment was prepared for it. Because the system was built to handle the environment as it actually exists: shifting, occupied, and never quite the same twice.
The JT128 is what made that possible.
Frequently Asked Questions
- What is the JT128, and what makes it different from standard lidar sensors?
The JT128 is a mini hyper-hemispherical 3D lidar specifically designed for robotics and industrial applications. What sets it apart is its 360° × 189° ultra-wide field of view, which expands coverage by 60% compared to similar products, enabling ground, frontal, and overhead detection simultaneously from a single unit, without sensor fusion complexity.
- How many channels does the JT128 have, and why does that matter for AMR perception?
The JT128 is equipped with 128 channels in the vertical direction, with the platform supporting up to 256 channels. In practice, this means the point cloud is dense enough to resolve fine geometry like pallet edges, rack contours, and human bodies, giving onboard vision AI models the input quality needed for safe, millimeter-level task execution in dynamic warehouse environments.
- What is the detection range of the JT128?
The JT128 features a detection range of up to 60 meters, with a single frame covering over 10,000 square meters, equivalent to 1.5 football fields. For warehouse and 3PL deployments, this means the sensor covers entire facility footprints in a single frame, without stitching or coverage gaps.
- How compact is the JT128? Can it be embedded into existing robot platforms?
The JT128 supports embedded installation with an exposed window height of only 23.8 mm, and weighs just 250 g. With a 70% reduced size compared to similar products, it can be integrated into a wide range of robot form factors without major redesign.
- Is the JT128 suitable for harsh industrial environments?
Yes. The JT128 has undergone reliability validation including UV aging, high-temperature testing, IPX7 dust and water resistance, mechanical shock, salt spray, thermal shock with water splash, low-temperature wakeup, humid heat cycling, and vibration with thermal cycling. It also carries Class 1 Eye Safety certification.
- What types of robots and applications is the JT128 designed for?
Applications include embodied intelligence, delivery robots, AGV/AMR, spatial sensing, stationary applications, and cleaning robots. The Thoro.ai CoreFlex deployment documented in this case study represents a high-density AMR use case in 3PL warehousing, one of the most demanding real-world environments for autonomous navigation.
- How does the JT128 support fleet-level deployments?
Because every vehicle in a fleet runs identical 128-channel hardware, fleet management systems receive a consistent, comparable data baseline across all units. Perception anomalies are immediately detectable as deviations from that baseline, enabling proactive maintenance and health monitoring at scale.
Learn more about the JT128 at hesaitech.com/product/jt128, or contact our sales team to discuss your deployment.


